
在自动化装配生产中,除了输送系统的连续输送方式外,还有很多场合需要快速准确地从一个位置抓取一个或多个工件,并将其送到另一个位置进行卸载。这通常由工程中两个非常重要的自动化设备来完成:机械手和机器人。
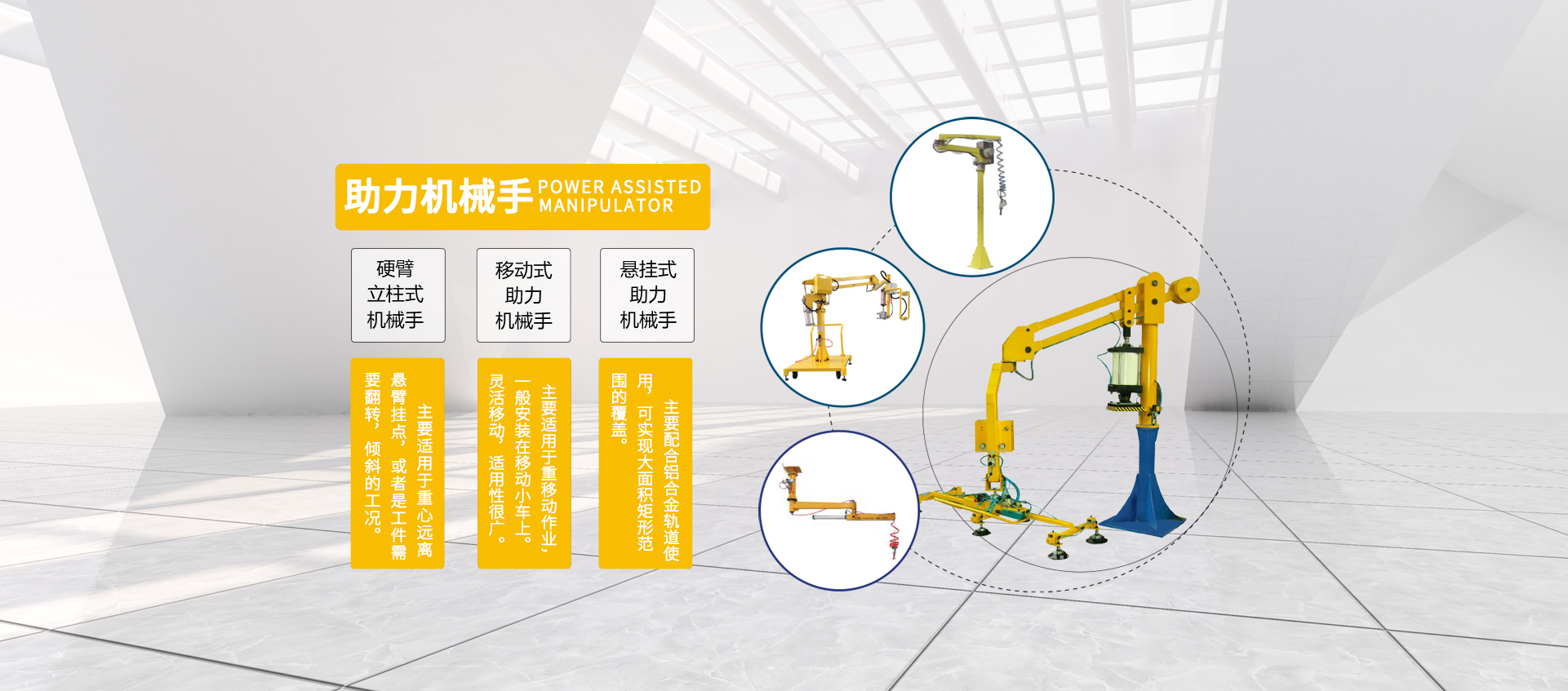
1.机械手:机械手是一种结构简单的自动化装置,大部分由气缸驱动,少数由电机驱动(精度更高)。机构的运动以直线运动为主,自由度较少,一般为2~3个。
2.机器人:机器人是一种自动化装置,功能更强大,只能高于普通机械手。伺服电机一般由多关节多自由度机构组成,一般有4、5、6个自由度(即俗称的4轴、5轴、6轴),其运动较为灵活。
人类通过非常灵活的手指和关节来抓取工件,但是机械手抓取工件的机械方式有很多种:真空吸盘和气动手指。

