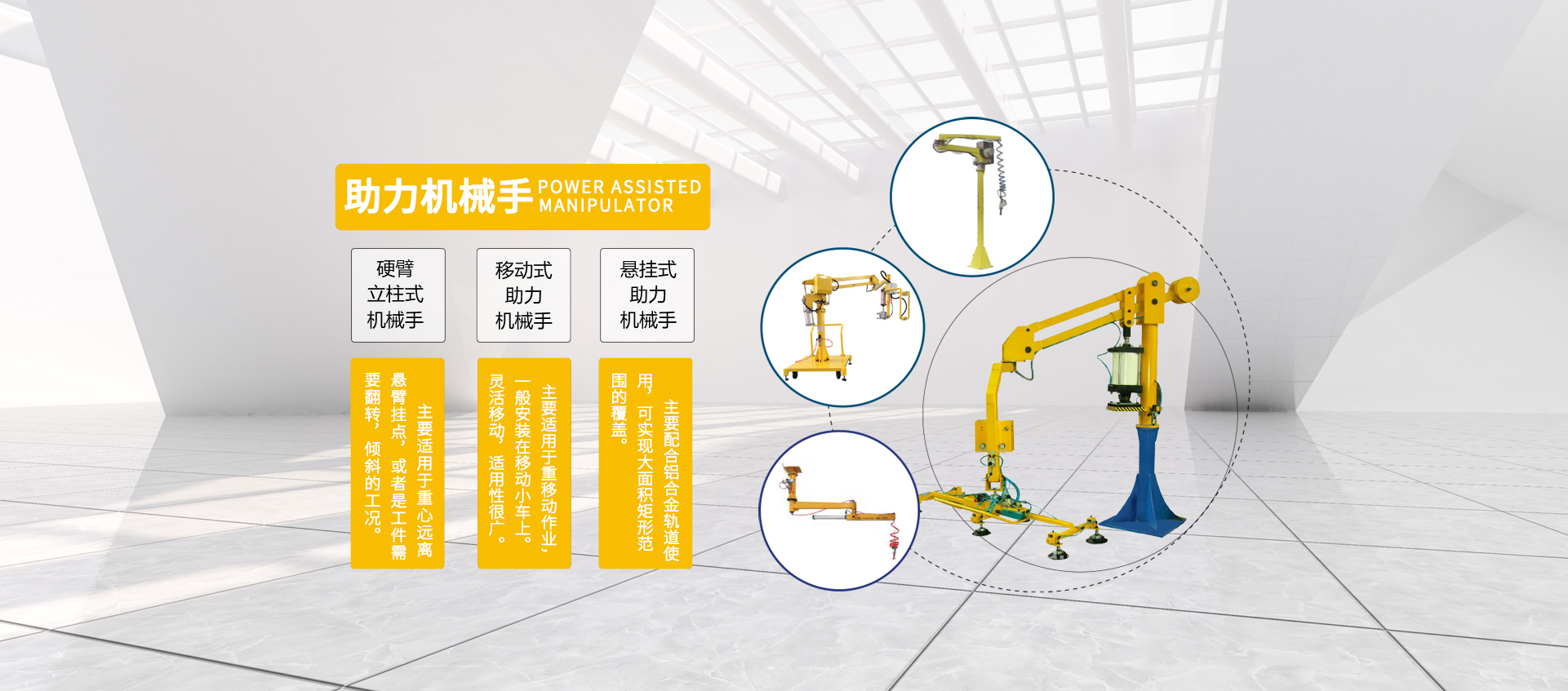

柔性设备是一种新型的动力设备,主要用于装配自动化生产线或其他材料的搬运、传输、包装和堆放。利用力平衡原理,智能辅助设备可以通过人机合作完成工作空间任何位置的重物控制、移动和定位材料,实现重物的改进和下降。为了提高材料处理中机械手的人机交互和灵活性,设计了一个可以实现人机合作的动力机械手控制系统。根据系统功能要求,双控制动力机械手控制系统可通过选择两种操作控制来实现系统工作。
该系统的硬件电路设计主要包括五个模块:主控制器模块、电源模块、信号采集模块、模数转换模块、电机驱动模块。
1.材料搬运机械手配备安全控制系统,包括气体保护装置、误操作保护装置、制动装置、承载极限保护装置、低压报警装置(可选)、反弹技术、防爆,因此材料搬运机械手不会迅速上升或下降,损坏人身、设备和产品!
2.悬浮无冲击,无反弹保证货物组装时的灵活对接,避免一般起重设备运行时的冲击和反弹。
3.物料搬运机械手配备的错误操作保护装置(即双重保险)可防止人员错误操作对设备和人员造成伤害。如果人员操作错误,只松开一个按钮,工件不能同时按下两个操作按钮(即工件安装到位前)。
4.工件表面保护:夹具可配备保护装置,保证工件外观不被划伤。

